Spécifications Techniques Générales du SIRC – Novembre 1976
Cette note, écrite en 1976, indique les principales orientations des Spécifications Techniques Générales des Systèmes Informatiques de Conduite des Dispatchings Régionaux. Elle faisait preuve d’une grande anticipation fonctionnelle et de grandes ambitions. On peut considérer que la satisfaction quasi complète de ses attentes initiales aura pris une vingtaine d’années…..
PRESENTATION DES SPECIFICATIONS TECHNIQUES GENERALES
DES SYSTEMES INFORMATIQUES
REGIONAUX DE CONDUITE
(S.I.R.C.)
J. Masson novembre 1976
—————–
RESUME :
Cette note indique les principales orientations des Spécifications Techniques Générales des Systèmes Informatiques de Conduite des Dispatchings Régionaux.
Cette note a pour but de présenter les Spécifications Techniques Générales des Systèmes Informatiques Régionaux de Conduite (S.I.R.C.) qui remplaceront les calculateurs 90-10 et 90-40 actuellement en service dans les Dispatchings Régionaux. Ces futurs systèmes informatiques devront permettre l’évolution des Dispatchings Régionaux en Centres Régionaux de Conduite (C.R.C.) pour qu’ils puissent assurer, outre la conduite des réseaux, la télécommande et la surveillance du matériel.
Ces Spécifications Techniques Générales ont été définies par un groupe de travail composé comme suit :
– Direction Production Transport :
. Service des Mouvements d’Energie :
Service Central M. BOTREL
C.I.M.E. Est M. GILLON
C.I.M.E.Nord et Paris M.MASSON (animateur)
C.I.M.E. Ouest M. GANDON
C.I.M.E. Sud-Est M. ADMET
C.I.M.E. Sud-Ouest M. LAMOTTE
. Service de la Production Hydraulique M. AMESTOY
. Service du Transport M. KOWAL
– Direction des Etudes et Recherches :
. Service Etudes de Réseaux
. Service Informatique et Mathématiques Appliquées
La préparation des travaux du groupe de travail et la rédaction des spécifications ont été assurées par une équipe permanente attachée au C.I.M.E. Nord et Paris[1].
Les Spécifications Techniques Générales constituent tout à la fois le rapport d’un groupe de travail et un cahier des charges pour les équipes qui seront chargées du projet, celles du constructeur (ou de la société de service) et de l’E.D.F. Ce document comprend donc des éléments plus complets que ce qui serait strictement nécessaire aux soumissionnaires, notamment en ce qui concerne les programmes d’application.
Les Spécifications Techniques Générales ont été rédigées dans l’hypothèse d’un appel d’offres unique pour les sept dispatchings. Cet appel d’offres serait lancé dans des conditions qui restent à déterminer auprès de soumissionnaires qui pourraient être des constructeurs ou des sociétés de service.
Cette hypothèse de l’appel d’offres explique que sur certains points, des possibilités de choix aient été maintenues. C’est en particulier le cas de l’architecture du système que le groupe de travail, tout en manifestant sa préférence pour une solution à trois calculateurs, a laissé aux soumissionnaires le soin de définir.
Les Spécifications Techniques Générales devront être complétées lors du lancement de l’appel d’offres par un document précisant les limites de fournitures et par un dossier technique indiquant aux soumissionnaires les principaux renseignements à fournir et l’échéancier de réalisation des sept dispatchings.
Les Spécifications Techniques Générales ont été décomposées en huit chapitres intitulés :
– Introduction
– Liaisons entre systèmes informatiques
– Périphérie de restitution et de dialogue
– Programmes d’application
— Base de données
– Logiciel de base
– Qualité de service
– Architecture
Dans cette note de présentation, un résumé du contenu de ces chapitres est donné, mettant en évidence les orientations retenues.
Quelques indications chiffrées ne figurant pas dans les Spécifications Techniques Générales, mais résultant d’études préliminaires, sont fournies pour l’évaluation de la charge du système et l’architecture.
CHAPITRE 1 – INTRODUCTION
L’objet de cette introduction est de situer les futurs systèmes informatiques de conduite (S.I.R.C.), en s’appuyant sur les décisions d’orientation de la Direction Production Transport, du Service des Mouvements d’Energie et les conclusions du groupe de travail « C.R.C. ».
Nous définissons pour cela :
– la conduite des réseaux, c’est-à-dire du système de Production et de Transport d’E.D.F.
– l’organisation du Service des Mouvements d’Energie
– l’évolution des Dispatchings Régionaux en C.R.C. et les attributions de ceux-ci
– les moyens mis en œuvre pour permettre aux C.R.C. de remplir leur fonction
– le rôle du S.I.R.C.
Cette présentation du rôle et de l’environnement du S.I.R.C. nous amène à préciser plus particulièrement quelques points fondamentaux :
La distinction dans l’exploitation entre phase prévisionnelle et phase « temps réel »
– La phase prévisionnelle couvre une période allant depuis la prévision journalière (exploitation du lendemain) jusqu’à la prévision à moyen terme (examen de la situation du réseau dans plusieurs années). Les traitements correspondants sont assurés par le Système de Gestion Energétique Prévisionnelle (S.G.E.P.) et n’ont pas à être pris en compte, sauf exception,’ par le S.I.R.C.
– La phase « temps réel » comprend les interventions immédiates et un examen prévisionnel du réseau dans le cadre de la journée (fonctions « temps réel- étendu »). Les traitements correspondants doivent être assurés par le S.I.R.C.
–
La disponibilité exigée pour les fonctions assurées par le S.I.R.C.
Nous avons regroupé les tâches à assurer par le S.I.R.C. dans quatre classes :
A) Les fonctions d’acquisition, de télécommande et de visualisation Ces fonctions permettent d’avoir une connaissance « brute » de l’état du réseau (télésignalisations et télémesures) et d’intervenir sur celui-ci.
Ces traitements sont indispensables et le taux de disponibilité requis doit être tel que la défaillance soit inférieure à une heure par an.
Il n’est pas acceptable, en effet, d’être privé plus longtemps et plus souvent de toute information et de toute possibilité d’action sur le réseau. Le taux de disponibilité doit donc atteindre 99,99 %.
B) Les fonctions d’analyse primaire et d’analyse secondaire en temps réel Il s’agit-là des fonctions permettant d’acquérir une connaissance approfondie de l’état du réseau et de le surveiller.
Une disponibilité élevée est toujours nécessaire puisque cette classe comprend des fonctions qui indiquent l’état réel du réseau. On peut néanmoins considérer qu’un taux de disponibilité de 99,90 % est acceptable soit une défaillance d’une dizaines d’heures par an.
C) L’analyse secondaire en temps réel étendu
Il s’agit des calculs pouvant porter sur des données issues du temps réel et sur des hypothèses prévisionnelles dans le cadre de la journée. Il est demandé, pour cette classe, un taux de disponibilité de 97 %.
D) Les fonctions de type « Centre de Calcul » pour lesquelles la disponibilité doit être supérieure à 90 %.
Les moyens matériels et logiciels devront satisfaire ces exigences étant entendu que les taux indic ne ne concernent que le S.I.R.C. , l’environnement informatique (CACQ) et technique (climatisation, alimentation) ayant une disponibilité adaptée à ces exigences.
Les étapes de mise en œuvre
Compte tenu des échéanciers, la mise en œuvre des fonctions devra être assurée en deux étapes :
1) Mise en service de toutes les fonctions liées à la conduite des réseaux Cette étape doit être accomplie dès la mise en service du S.I.R.C. dans le premier dispatching rénové (deuxième semestre 1979).
2) Mise en service des fonctions de télécommande et de surveillance des installations à partir de 1982.
CHAPITRE 2 – LIAISONS ENTRE SYS TEMES INFORMATIQUES
Ces liaisons permettent de réaliser les tâches d’acquisition de données et d’émission d’ordres ou d’informations. Les calculateurs du S.I.R.C. devront échanger des informations avec :
– les CACQ
– le terminal du S.G.E.P.
– le processeur chargé de l’animation du tableau synoptique. Il est demandé que le raccordement du S.I.R.C. à d’autres systèmes soit aisément réalisable.
Les liaisons entre les différents calculateurs du S.I.R.C. dépendent de l’architecture choisie et seront traitées par ailleurs.
Liaisons CACQ – S.I.R.C.
C’est par elle que transitent toutes les informations « Temps Réel » issues du réseau, les ordres de téléaction (téléréglage, télécommande, etc..), les échanges avec le SYSDIC et les autres S.I.R.C.
Les informations échangées peuvent être du type « urgent » (données du temps réel), le CACQ est alors le calculateur « frontal » du S.I.R.C., ou du type « différé » (données binaires échangées entre régions, le CACQ est alors un commutateur de messages.
Un principe semblable à celui de la liaison CACQ – SYSDIC, a étéretenu. Une description détaillée de cette liaison est donnée dans une note établie par le Service du Transport et jointe en annexe au chapitre 2.
C’est une liaison de transmission série Full-Duplex doublée. La vitesse de transfert est de l’ordre de 50 000 bits/seconde.
La procédure de transmission (l’organisation logique des transmissions) est de type HDLC (High Level Data Link Control) en cours de normalisation à E.D.F. Le logiciel correspondant devrait donc pouvoir être fourni par E.D.F.
Les informations sont groupées en blocs homogènes de données du même type (TS ou TM ou TC). Chaque bloc est caractérisé par un code fonction qui annonce la nature des informations qu’il contient. Ils sont précédés d’en-têtes de transmission qui permettent de les aiguiller convenablement.
Les échanges sont déclenchés soit périodiquement (300 ou 500 ms), soit lorsque la zone correspondant à un type de données est pleine. La taille des messages est actuellement limitée à 128 octets mais la possibilité de la faire varier doit être prise en compte.
A la réception, un ordre de priorité a été retenu pour les blocs :
– données arythmiques (TS)
– données cycliques (TM)
– données « binaires »
Les données « individuelles » TS ou TM se présenteront sous la forme d’un groupe d’octets comprenant l’adresse nationale d’une part, la valeur d’autre part.(Une description de l’adressage national est donnée en annexe au chapitre 2).
Les données « binaires » ont une présentation différente, elles comportent un identificateur propre à chaque donnée et qui n’est accessible qu’au logiciel du S.I.R.C. destinataire.
Liaisons S.I.R.C. – S.G.E.P.
C’est par cette liaison que transitent, d’une part, certains résultats d’exploitation nécessaires à la mise à jour de la base de données du S.G.E.P., d’autre part, certaines prévisions, résultats des modèles du S.G.E.P.
Pour cette liaison un principe identique à celui de la liaison CACA – S.I.R.C. est retenu. Dans la mesure du possible, les messages seront présentés sous la même forme que les données « binaires » issues du CACQ.
Liaison S.I.R.C. – Processeur de synoptique
Le principe a été retenu d’animer les futurs tableaux synoptiques par l’intermédiaire d’un processeur relié aux CACQ et au S.I.R.C. en vue de séparer les fonctions par nature et de faciliter la spécificité du tableau synoptique dans chaque dispatching.
L’introduction d’un processeur dont le logiciel serait adapté à chaque région permet de préserver l’homogénéité du logiciel du S.I.R.C. puisque l’animation du synoptique se ramène à un transfert d’informations. Le S.I.R.C. émettra des informations d’état ou de mesures et recevra du processeur des acquits et des demandes de contrôle général.
Il faut d’ailleurs rappeler qu’un processeur est d’ores et déjà envisagé par le Service du Transport pour transmettre sur les tableaux synoptiques actuels, dès 1977, les informations qui seront gérées par les CACQ sans transiter par les équipements classiques. Il serait souhaitable d’étudier l’animation des futurs synoptiques en liaison avec cette étude.
La liaison S.I.R.C. – processeur de synoptique sera une liaison téléinformatique bidirectionnelle dont les caractéristiques restent à définir mais qui pourra être choisie identique aux précédentes par souci d’homogénéité.
CHAPITRE 3 – PERIPHERIE DE RESTITUTION ET DE DIALOGUE
Dans ce chapitre, les caractéristiques souhaitées pour la périphérie de restitution et de dialogue sont examinées.
Système de visualisation
Ce système a été étudié plus particulièrement car il apporte aux dispatchers les informations en temps réel et leur permet d’agir sur le réseau par l’intermédiaire de la télécommande.
Pour répondre aux besoins définis, le matériel est tout d’abord examiné puis le logiciel et enfin les types de dialogue homme-machine sont envisagés.
Dans la définition du logiciel désiré, il est indiqué non seulement celui qui devra être fourni par le constructeur, mais aussi celui qui est à la charge d’E.D.F.
Matériel
Le choix se porte sur des écrans graphiques, polychromes à balayage cavalier, avec au minimum trois couleurs aisément discernables. Les écrans pourront être rectangulaires ou circulaires. La diagonale (ou le diamètre) de leur surface utile ne devra pas être inférieure à 45 cm.
Ce type d’écran semble être le seul qui garantisse une définition de l’image suffisante pour afficher des zones électriques importantes. Le matériel vidéo semi-graphique permet un choix de couleurs plus important mais les possibilités de définition de l’image sont plus réduites.
Les dispositifs de commande de ces écrans seront constitués par un clavier alphanumérique universel et par un dispositif de désignation sur l’écran qui sera un photostyle (light pen).
Tous les écrans seront de même nature et possèderont les mêmes caractéristiques techniques. Un poste de travail complet comprendra trois écrans. La désignation à l’aide d’un photostyle devra pouvoir s’effectuer sur deux des trois écrans, le troisième n’étant pas un écran de dialogue mais uniquement d’affichage. C’est le fait d’avoir à utiliser le même dispositif pour deux écrans différents qui conduit à préférer le photostyle à la « boule roulante ».
La perte d’un écran ne devra pas empêcher une marche dégradée d’un poste de travail avec un seul écran de dialogue, l’autre étant utilisé en affichage.
Des postes de travail partiels à un ou deux écrans pourront être installés pour certaines tâches d’études.
Logiciel
Les images temps réel devront être affichées avec un temps de réponse inférieur à la seconde. Ceci exclut la possibilité de générer dynamiquement en temps réel l’ensemble des images mises à la disposition des exploitants.
La phase temps réel devra donc être précédée par une phase « centre de calcul », et les besoins en logiciel correspondront à ces deux types de travaux.
La phase temps réel peut être réalisée à l’aide des programmes suivants
. Moniteur graphique temps réel. Il assure la gestion des échanges entre les calculateurs pilotes (S.I.R.C.) et les unités de traitement du système de visualisation.
. Traitement des interactions. Activé par le moniteur graphique, il s’agit d’un automate constitué de données à deux niveaux :
. pour chaque image, un tableau donne la liste des entités désignables.
. pour chaque état de l’automate, un tableau donne la liste de tous les types d’actions possibles.
– Programme de composition des images, qui prépare l’image à afficher.
– Programme de rafraîchissement.
Le moniteur graphique temps réel devra être fourni par le constructeur mais les trois autres programmes seront réalisés par E.D.F.
La phase « centre de calcul » nécessite que le constructeur fournisse un certain nombre d’outils généraux que l’on peut répartir en quatre classes :
– génération de codes graphiques
– outils de mise au point
– traducteur (ou désassembleur)
– outils de test.
. Dialogue homme machine
La sélection des images sera fondée sur le principe de la recherche hiérarchisée.
Une image « répertoire » permettra d’initialiser cette recherche. La progression dans l’arborescence des images se fera par désignations successives. Cette image « répertoire » pourra être obtenue soit à partir d’autres images de l’arborescence, soit à l’aide d’une touche (notamment lors de l’initialisation d’un écran).
La procédure d’appel d’une image sera la suivante :
— désignation sur l’image d’un marqueur ou d’un libellé
— validation de la demande par touche incorporée au photostyle.
L’image apparaissant alors contiendra l’information désirée ou comportera une série de marqueurs ou de libellés permettant de progresser dans l’arborescence.
Les images seront composées de deux types de zones :
— la zone utile
— les zones de service réservées aux marqueurs de progression dans l’arborescence et aux libellés de paramètres.
On distinguera trois types d’affichage :
— Affichage temps réel sur demande du dispatcher, qui comprend l’affichage sur trame topologique d’une zone, d’un poste, d’une vallée ou d’une usine hydraulique et l’affichage par listes, tableaux et courbes. I1 s’effectue sur les deux écrans accessibles au photostyle.
— Affichage temps réel aléatoire qui concerne la visualisation de tous les évènements aléatoires qui doivent être portés à la connaissance du dispatcher. Il s’effectue sur le troisième écran du poste de travail.
— Affichage d’étude. Pour la visualisation des résultats d’études et pour l’introduction des hypothèses, il est souhaitable de disposer de moyens de dialogue semblables à ceux utilisés pour le temps réel. Ceci nous conduit donc– à rechercher pour les fonctions d’études un système de visualisation comparable à celui retenu dans l’affichage temps réel à la demande du dispatcher. Il est ‘possible de spécialiser un écran graphique pour les fonctions d’études ou d’utiliser un des écrans du temps réel, à condition de dissocier clairement les fonctions d’affichage temps réel et études.
Pour l’organisation du dialogue homme – machine, nous avons retenu essentiellement la désignation par photostyle. Bien entendu, il est toujours possible de remplacer un libellé désignable par une touche pour éviter des désignations trop fréquentes. Il est possible qu’habitués à la désignation par touches, certains exploitants souhaitent son maintien. Il faut alors remarquer que le nombre et la complexité des ouvrages et des fonctions désignables interdit l’utilisation exclusive des touches, et que par conséquent, l’emploi de deux modes de désignation introduit une difficulté supplémentaire dans le dialogue homme-machine.
Périphérie de restitution sur papier
Plusieurs dispositifs de restitution sur papier sont à envisager :
Dispositif de recopie sur papier
Un dispositif permettant de reproduire sur papier l’image présente sur chacun des écrans d’un poste est demandé. Si un tel dispositif (hard copy) ne peut être raccordé directement ou indirectement sur le système de visualisation, un traceur de courbes sera utilisé.
Imprimantes rapides
Deux imprimantes rapides dont la vitesse pourra être comprise entre 600 et 900 lignes par minute sont nécessaires. L’une située au niveau du dispatching permettra la restitution d’informations selon les besoins des exploitants, l’autre sera utilisée au centre de calcul.
. Machines à écrire
Ces dispositifs servent au contrôle de l’état de chaque calculateur et pourront être utilisés en entrée et en sortie. Elles peuvent éventuellement être remplacées par des ensembles « console alphanumérique – imprimante lente »
CHAPITRE 4 – PROGRAMMES D’APPLICATION
Dans ce chapitre sont décrits les principes des programmes d’application mis en œuvre par le S.I.R.C.
Certains de ces programmes ne seront intégrés dans le logiciel d’application qu’en deuxième étape lors de l’évolution des dispatchings en C.R.C., la surveillance et la télécommande du matériel devenant alors effectives.
Tous ces programmes sont à la charge d’E.D.F., et si à ce stade des Spécifications Techniques l’analyse reste assez générale, des éléments permettant une évaluation de la charge et l’étude des spécifications détaillées sont fournis.
C’est ainsi que pour chaque programme d’application on donne :
– le mode et la fréquence d’activation, les modèles les plus prioritaires étant signalés
– la nature des données en entrée
– le traitement mis en œuvre et des indications sur les algorithmes
– l’utilisation des résultats
– les caractéristiques, c’est-à-dire essentiellement le nombre approximatif d’instructions déroulées ou des résultats extrapolés de bancs d’essais (bench mark) pour les modèles les plus complexes.
Dans cette note de présentation des Spécifications Techniques, seul le rôle de chaque programme et ses particularités seront indiqués. TRAITEMENTS D’ACQUISITION ET DE REGLAGE
Ces traitements constituent la base de l’ensemble du système temps réel puisqu’ils assurent le rafraîchissement de la base de données et permettent à l’exploitant de suivre l’évolution du réseau.
Cinq tâches peuvent être distinguées pour lesquelles bien entendu le taux de disponibilité le plus élevé est demandé (99,99 %)•
Acquisition des télémesures
Ce programme range dans les tables résidentes les télémesures brutes qui sont envoyées au S.I.R.C. par le calculateur d’acquisition. Ces télémesures sont utilisées ensuite pour renseigner les images temps réel
Acquisition des télésignalisations
Ce programme met à jour les tables d’état des télésignalisations et les listes chronologiques correspondantes. Les changements d’état sont systématiquement signalés sur l’écran d’alarme.
Topologie nodale
Ce programme détermine le schéma électrique du réseau et il établit pour chaque nœud électrique la liste des départs et des injections raccordés. Ce programme est préparatoire à toute analyse secondaire et il permet de plus de détecter les réseaux séparés.
Traitement du niveau fréquence-puissance
Le niveau est transmis à la région par le SYSDIC. Le S.I.R.C. effectue les traitements relatifs au niveau fréquence-puissance portant sur :
– la diversification
– l’affectation des niveaux diversifiés aux groupes en réglage
– le calcul à partir de ces niveaux de la charge active pour les usines hydrauliques de première intervention qui sont en réglage, en suivant le programme de marche de ces usines
– l’émission du niveau (pour les groupes thermiques) ou de la télécommande de puissance active (pour les groupes hydrauliques télécommandés).
Téléréglage secondaire de la tension
Ce programme doit pouvoir élaborer pour chaque groupe un ordre de participation au réglage de tension qui doit lui permettre de maintenir le niveau de tension souhaité dans la zone sur laquelle il est raccordé. Ce réglage s’effectue soit par consigne de production de réactif pour les groupes thermiques, soit directement par consigne de tension pour les groupes hydrauliques.
TELECOMMANDE
La possibilité généralisée de transmettre des ordres aux organes de coupure, aux automates du réseau et à certaines usines sera une des caractéristiques nouvelles des futurs dispatchings.
Cette évolution sera progressive et interviendra dans une seconde étape lorsque les dispatchings régionaux se transformeront en Centres Régionaux de Conduite. Cependant, les Spécifications Techniques Générales doivent en tenir compte au niveau d’une analyse globale.
Cette évolution s’accompagnera de la disparition du gardiennage des postes ; aussi la fonction « Télécommande » doit-elle bénéficier du taux de disponibilité le plus élevé.
Les traitements associés à cette fonction se situent à deux niveaux :
– l’analyse de l’ordre de télécommande permet de contrôler et de prendre en compte une demande du dispatcher,
– la gestion d’une télécommande contrôle la réalisation effective des ordres.
Ces traitements découlent d’une note globale sur l’organisation de la télécommande, jointe en annexe.
Organisation de la télécommande
Les ordres de télécommande sont transmis au calculateur par l’intermédiaire d’un écran de visualisation et des moyens de dialogue associés. La télécommande est possible depuis une image de zone, de poste ou d’usine.
L’opérateur sélectionne successivement la fonction, le ou les ouvrages ou organes concernés, et l’ordre de télécommande choisi à l’aide du photostyle. Certains choix pourront être effectués à l’aide de touches sans remettre fondamentalement en cause les options prises.
Après analyse de l’ordre de télécommande et si aucun problème n’est détecté, la position finale des organes désignés sera représentée dans une couleur différente de celle du schéma. L’ensemble des organes à manœuvrer pour la réalisation de l’ordre sera caractérisé par un clignotement. Le dispatcher devra confirmer sa demande en appuyant sur une touche « CONFIRMATION ». Le programme de gestion de la télécommande est alors activé.
Cette organisation est générale mais sa mise en œuvre varie suivant la nature des ouvrages télécommandés.
Analyse d’un ordre de télécommande sur le réseau de transport
La télécommande pourra s’effectuer au niveau d’un organe (ordre élémentaire) ou au niveau de plusieurs organes ou d’ouvrages (ordre de fonction
Il convient également de distinguer les manœuvres pour la réalisation d’un schéma d’exploitation et celles en vue d’une consignation.
Pour la réalisation d’un schéma d’exploitation :
– les ordres élémentaires comprennent : OUVERTURE ET FERMETURE
– les ordres de fonction : CONNEXION, DECONNEXION, MISE HORS TENSION, SCHEMA.
Pour les manœuvres en vue d’une consignation, on distinguera :
– les ordres élémentaires : OUVERTURE ET ALIENATION
FERMETURE ET ALIENATION
DESALIENATION
– l’ordre de fonction : RETRAIT.
Analyse d’un ordre de télécommande d’usine hydraulique
Deux modes de commande sont prévus, qui permettent d’assurer la conduite des usines :
– l’action programmée qui est normalement utilisée. Les programmes sont transmis au S.I.R.C. depuis le S.G.E.P. Ils peuvent être modifiés par le dispatcher dans le cadre du « temps réel étendu » à l’aide du système de visualisation et de dialogue.
– l’action immédiate qui permet au dispatcher d’agir en temps réel sur les groupes.
Remarque : La télécommande des automates d’exploitation peut se ramener au niveau de l’analyse de l’ordre, soit à un ordre élémentaire sur le réseau de transport (EN ou HORS service), soit à une action immédiate sur une usine hydraulique (envoi d’une télévaleur de consigne TVC).
La télécommande des turbines à gaz peut également se ramener à un des cas précédemment traités.
Gestion de la télécommande en cours
-Ce programme contrôle l’exécution séquentielle d’une liste d’ordres élémentaires.
Il concerne :
– dans les postes, les télécommandes d’organes
– dans les usines hydrauliques (ou turbines à gaz), les télécommandes d’organes ou de types de fonctionnement.
ANALYSE PRIMAIRE
L’analyse primaire utilise les données brutes du temps réel pour effectuer des traitements simples.
Ces fonctions, moins vitales que l’acquisition et la télécommande, ne doivent cependant pas être indisponibles plus d’une dizaine d’heures par an (99,90%). Les programmes correspondants devront être mis en service dès la mise en place du S.I.R.C.
Contrôles logiques
La validité technique des traitements effectués par le système informatique et leur crédibilité aux yeux des exploitants reposent sur la qualité des téléinformations reçues. Ce programme effectue au niveau du S.I.R.C. un contrôle complémentaire aux tests de validité effectués au niveau des CACQ.
Ces contrôles se composent de tests de Boucherot par postes, par nœuds, de contrôles de cohérence entre les télémesures et les télésignalisations, associées à un même départ et de contrôles en actif sur les lignes télé-mesurées aux deux extrémités.
Surveillance des dépassements de seuils
Un certain nombre de termes mesurés ou calculés sont périodiquement comparés à des valeurs limites dont le dépassement marque l’apparition d’une contrainte d’exploitation.
Trois programmes, de récurrences différentes, assurent cette fonction qui pour l’exploitant est unique.
—Traitement « 10 secondes » : Le passage par zéro de tous les groupes de production télémesurés est surveillé et, pour un certain nombre d’ouvrages choisis par le dispatcher, les télémesures sont comparées aux seuils fixés.
– Traitement « minute ». Ce programme effectue :
– un contrôle systématique par rapport à l’IMAP (Intensité maximale admissible en permanence).
. un contrôle systématique des télémesures de tension pour chaque poste par rapport à une fourchette qui lui est propre.
. des contrôles à la demande, portant sur des termes calculés (sommes de puissances actives et réactives, gradients de mesures, intensités).
– Traitement semi-horaire
Les programmes prévisionnels des groupes et les bilans prévisionnels des consommations sont comparés aux charges et bilans mesurés.
Bilans et stockages
La conservation de différentes grandeurs à pour but :
– de permettre l’étude ultérieure de situations particulières (incidents
– de faire des bilans énergétiques.
Plusieurs stockages peuvent être distingués :
– des stockages « 10 secondes » portant sur l’ensemble des télémesures
– des stockages « 10 minutes » portant sur des moyennes de mesures
– des stockages « 30 minutes » ou à la demande portant sur des situations complètes (mesures et topologie)
– des stockages aléatoires concernant les changements d’état.
Intensités
Les contraintes d’exploitation sont surtout liées aux intensités sur les liaisons alors que le plan de téléinformations propose principalement des mesures de transits actifs ou réactifs. Il est donc nécessaire de calculer les intensités.
Télécomptages
Les comptages d’énergie relevés pour les lignes d’échange avec l’étranger sont collectés en vue de leur utilisation en secours par le SYSDIC.
ECHANGE D’INFORMATIONS ELABOREES
Des échanges d’informations élaborées doivent être effectués avec différents systèmes informatiques en dehors des fonctions d’acquisition et de réglage.
Le rôle des programmes utilisateurs décrits ici se trouve donc limité :
.- en réception, à l’identification du type des informations reçues avant de les transmettre sous une forme utilisable aux programmes utilisateurs
– en émission, à l’extraction des informations de la base de données et à leur mise en forme par le destinataire final.
Traitement des messages S.G.E.P.
Ce traitement prépare les messages à émettre du S.I.R.C. vers le S.G.E.P. ou utilise les informations reçues.
Traitement des messages’ binaires »
Ce traitement gère les échanges de données binaires entre deux S.I.R.C. de régions différentes ou entre un S.I.R.C. et le SYSDIC, à travers le réseau T.T.R.
Mise à jour du synoptique
Systématiquement, un certain nombre d’informations issues de la base de données temps réel sont communiquées au processeur d’animation du synoptique pour affichage.
ANALYSE SECONDAIRE TEMPS REEL
L’analyse secondaire utilise les résultats de l’analyse primaire et met en jeu des modèles mathématiques complexes.
Les modèles correspondants seront mis en service dès la première étape, et devront bénéficier d’une disponibilité comparable à celle de l’analyse primaire.
Estimation d’état
Ce modèle, rend, cohérentes entre elle, les télémesures de l’ensemble du réseau, calcule les injecteurs équivalents et complète l’épuration des erreurs de téléinformations. Ce modèle ne sera appliqué qu’au réseau THT car il nécessite une forte redondance dans les télémesures.
Appréciation d’état
Ce modèle permet d’apprécier l’état des réseaux HT qui sont faiblement télémesurés.
Trois traitements permettent de suivre l’évolution de ces réseaux :
. Le calcul de base complet tient compte des modifications de topologie et d’injections.
. Un calcul de base simplifié est suffisant lorsque la topologie reste figée, quelles que soient les variations des injections.
. Un calcul partiel est possible lorsque la topologie reste figée, pour tenir compte du glissement des consommations, en supposant que les consommations finales sont homothétiques des consommations initiales.
Deux modèles de calculs sont décrits, l’un est en exploitation au C.I.M.E. Ouest, l’autre est proposé par la D.E.R. Le choix entre ces .deux modèles sera effectué au niveau de l’analyse détaillée en fonction des performances respectives.
Les modèles d’estimation et d’appréciation d’état sont chainés et s’exécutent toutes les minutes s’il n’y a pas eu de changement de topologie et tous les quarts d’heure dans le cas contraire où ils sont alors suivis du calcul de sécurité.
Calcul de sécurité en courant continu
Ce modèle a pour objet la détection des dépassements potentiels de seuils consécutifs au déclenchement d’ouvrages de production et de transport.
Le nombre des ouvrages sur lesquels porte-un déclenchement est limité
à cent pour des raisons de temps de traitement. Ces ouvrages seront introduits selon deux modes distincts :
— par le dispatcher
— de façon automatique, en prenant comme critère la charge relative des liaisons.
Ces calculs systématiques ne s’effectueront qu’en actif afin que le temps de traitement ne soit pas prohibitif. Le dispatcher a la possibilité de demander des analyses de sécurité en actif et réactif.
Calculs des réseaux équivalents
Les calculs de sécurité dans la mesure où ils simulent des déclenchements s’appuient sur une représentation des réseaux extérieurs aux réseaux de calcul. Ils permettent ainsi de tenir compte de la part des reports de charge supportée par les réseaux extérieurs, Chaque région doit donc calculer les impédances équivalentes à des parties de son réseau pour envoi au SYSDIC ou pour ses calculs de sécurité.
Estimation des apports-et des productions hydrauliques
Le but de ce programme est d’évaluer en temps réel les apports hydrauliques sur les différents réservoirs ainsi que les productions au fil de l’eau.
Suivant les données disponibles et les grandeurs à évaluer, l’un ou l’autre des modèles suivants est activé
– L’estimation des apports et des productions de fil à partir de-grandeurs témoins. Ce modèle, basé sur une formule de corrélation statistique entre la grandeur estimée et les valeurs témoins est particulièrement destiné à l’estimation des apports et des productions sur les usines de fil.
– Le calcul des apports à partir de télémesures de cotes et de puissance. Ce modèle, basé sur un calcul rigoureux, nécessite la connaissance d’un certain nombre de télémesures ; il ne peut être utilisé que pour les usines suffisamment .télémesurées.
ANALYSE SECONDAIRE EN TEMPS REEL ETENDU
Cette analyse en temps réel étendu permet de préparer l’exploitation. Elle va depuis le temps réel jusqu’au lendemain, soit une période qui peut s’étendre jusqu’à 36 heures.
Ces .études-mettent en jeu des modèles- complexes dont les durées de traitement sont de l’ordre de plusieurs minutes.
Déconnectés du temps réel immédiat, ces traitements sont activés à la demande ou périodiquement (mais avec une récurrence faible). De ce fait, le taux de disponibilité exigé est moindre que pour les traitements systématiques du temps réel, et un taux de 97 % semble suffisant.
Tous ces modèles seront en service dès la première étape de la réalisation des S.I.R.C.
Calcul de sécurité en alternatif
Ce modèle permet au dispatcher de simuler diverses situations d’exploitation à partir d’un réseau de base qui peut être le réseau THT ou l’un des réseaux HT de la région. Ce calcul effectué en alternatif s’appuie sur des données filtrées par l’estimation d’état ou l’appréciation d’état. Dans le cas où de telles données ne sont pas disponibles pour le réseau que veut étudier le dispatcher, il faut reprendre un calcul d’estimation d’état préalablement au calcul de répartition.
Calcul des puissances de court circuit
Ce calcul porte sur le réseau temps réel éventuellement modifié par le dispatcher ou sur une situation passée. La puissance de court circuit est calculée dans le cas du défaut triphasé symétrique.
Ajustement hydraulique en temps réel étendu
Le but de ce programme est d’optimiser le placement à l’intérieur d’une même journée, d’une production hydraulique supplémentaire non prévue par le « P4 » journalier. Ce programme n’existe pas à l’heure actuelle.
Evaluation des prévisions d’apports et de productions hydrauliques
Le but de ce modèle est d’évaluer plusieurs heures à l’avance la quantité et l’évolution des apports sur une région donnée.
La connaissance de ces apports permet, en effet, aux régions hydrauliques de transmettre au Dispatching Central leurs prévisions de production. Ce dernier peut ainsi gérer au mieux le parc de production thermique.
Ajustement- hydraulique journalier P4
Le but de ce modèle est d’établir les programmes journaliers de production de chaque usine hydraulique par points demi-horaires pour les deux jours à venir. Du domaine prévisionnel, il est normalement effectué sur le S.G.E.P. mais doit pouvoir être assuré sur le S.I.R.C. en secours.
Il existe actuellement deux modèles sensiblement différents pour réaliser cette fonction, aux C.I.M.E. Sud-Est et Sud-Ouest, mais pour l’intégration dans le S.I.R.C., un programme unique devra être réalisé.
Prévisions de consommation
La connaissance des prévisions de consommation permet d’ajuster les programmes d’exploitation au niveau du temps réel étendu et de surveiller la consommation effective en temps réel.
Les prévisions issues du S.G.E.P. sont ainsi affinées dans chaque région par l’utilisation des tout derniers résultats enregistrés en temps réel et par une meilleure connaissance des paramètres mis en jeu dans cette prévision (température, aléa particulier).
Au gré de la région, ce modèle pourra s’appliquer à des bilans par zone ou par type de consommation.
Simulation de situations d’exploitation
Cette fonction a pour but d’assurer la formation et le perfectionnement du dispatcher, en lui demandant de faire face à des évènements simulés, le plus près possible des conditions réelles d’exploitation.
Au niveau des Spécifications Techniques Générales, cette fonction est décrite de manière non exhaustive.
Le principe consiste à exécuter un calcul de répartition prenant en compte les modifications de topologie et d’injections introduites par l’opérateur ; ce calcul lui indique immédiatement les répercussions de ses décisions sur la charge des ouvrages dont il assure la conduite fictive.
ANALYSE A POSTERIORI
Dans cette rubrique, ce sont plus des notions générales que des programme: qui sont décrites car l’étude fonctionnelle de l’analyse a posteriori est encore en développement.
Les fonctions correspondantes ont pour but la visualisation ou l’édition de documents permettant à l’exploitant de connaître et d’analyser le fonctionnement passé du réseau et du système de téléinformations.
Ces fonctions peuvent avoir un caractère de temps réel étendu ou un caractère statistique :
Dans le premier cas, elles se déroulent sous temps réel et sont déclenchées par l’exploitant ;
Dans le second, elles se déroulent hors temps réel et sans perturber celui-ci (les programmes correspondants sont alors écrits en langage évolué).
Les données utilisées sont les informations périodiques ou aléatoires stockées sur disque ou sur bande magnétique (suivant leur ancienneté).
Les sorties se font sur écran ou imprimante.
La liste des fonctions décrites essaie de cerner les besoins actuels et futurs des exploitants, mais n’a pas de caractère limitatif, de nouveaux besoins en la matière pouvant toujours apparaître en cours d’exploitation.
On peut distinguer :
a) Les fonctions d’analyse du fonctionnement du réseau qui se décomposent en :
– fonctions accessibles au dispatcher comprenant la visualisation et l’affichage
. de situations instantanées
. d’évolution de termes
. d’évènements aléatoires
. de comparaison de réalisations aux prévisions
– fonctions accessibles hors temps réel, utilisant essentiellement les restitutions sur papier, et portant principalement sur :
. l’analyse des incidents
. les bilans
. les statistiques
b) Les fonctions d’analyse du fonctionnement des télétransmissions, venant en complément des statistiques effectuées sur les CACQ et comprenant :
– les anomalies des téléinformations
– les anomalies de la télécommande.
CONCLUSION,
Dans les Spécifications Techniques Générales sont fournis, pour chaque programme, les résultats de bancs d’essais ou une évaluation du nombre d’instructions déroulées lors de l’exécution. Ces éléments doivent permettre aux soumissionnaires de calculer la charge du système. Ils sont regroupés dans des tableaux joints en annexe au chapitre « Programmes d’application ».
Nous avons également effectué dans une étude préliminaire, un calcul de la charge avec des MITRA 125 en prenant 3 µs comme temps moyen d’instruction et en extrapolant les résultats de bancs d’essais (Ces données ne sont bien entendu pas communiquées dans les Spécifications Techniques Générales).
Le tableau ci-dessous indique par classe de fonctions le taux d’occupation moyen ainsi calculé.
| Classe | Fonctions | Traitementssystématiques | Charge complémentairede pointe |
| A | Acquisition, visualisation, télécommande |
14 % |
10% |
| B | Analyse primaire |
2 % |
3,8 % |
| Analyse secondaireen temps réel |
14 % |
38 % |
|
| C | Analyse secondaireen temps réel étendu |
11% |
La charge complémentaire de pointe correspond aux traitements à effectuer lorsqu’une avalanche de changements d’état se produit. Nous constatons que l’analyse secondaire en temps réel avec changement de topologie introduit une charge très importante pour l’unité centrale.
CHAPITRE 5 – BASE DE DONNEES.
Evaluation des grandeurs caractéristiques du réseau
Les nouveaux systèmes informatiques régionaux doivent être conçus pour aborder l’année 1990.
Compte tenu de l’évolution actuellement constatée, il a semblé possible d’utiliser l’étude du plan à long terme à l’horizon 1985, pour déterminer les dimensions des réseaux à prendre en compte.
Quelques règles simples ont fourni le plan des téléinformations correspondant. Ce plan par son caractère systématique et exhaustif, conduit probablement à un léger surdimensionnement. Cette « marge de sécurité » reste nécessaire au niveau des Spécifications Techniques Générales.
Le tableau ci-dessous donne la récapitulation du nombre des grandeurs caractéristiques.
GRANDEURS CARACTERISTIQUES DES RESEAUX (Horizon 1985)
| Site | Nombre de postes | Nombre liaisons | NombreCellules | NombreGroupes | Nombre. consommations | NombreTM | Nombre TS | |||||||
| THT | HT | Coupure | Alarme | Surveil-lance | ||||||||||
| THT | HT | Physique | THT | HT | ||||||||||
| Lille | 110 | 200 |
170 |
200 |
130 |
1660 |
25 |
100 |
210 |
850 |
5000 |
5400 |
13000 |
|
| Lion | 150 | 500 |
500 |
280 |
700 |
4600 |
500 |
50 |
500 |
1300 |
13800 |
15200 |
23500 |
|
| Marseille | 100 | 300 |
300 |
180 |
400 |
2700 |
150 |
20 |
350 |
800 |
8000 |
8900 |
20000 |
|
| Nancy | 150 | 520 |
550 |
290 |
850 |
4670 |
88 |
30 |
780 |
1300 |
13500 |
14000 |
35600 |
|
| Nantes | 130 | 420 |
430 |
315 |
650 |
4820 |
50 |
40 |
840 |
1700 |
15000 |
15000 |
34600 |
|
| Paris | 200 | 300 |
440 |
460 |
440 |
4600 |
50 |
200 |
700 |
1800 |
13800 |
15400 |
33200 |
|
| Toulouse | 100 | 600 |
615 |
200 |
550 |
3050 |
575 |
10 |
500 |
1400 |
7000 |
12000 |
25500 |
|
Evaluation de la base de données
Trois types de données peuvent être distingués :
– les données fixes
– les informations temps réel, images de l’état actuel du réseau
– les stockages qui permettent la reconstitution a posteriori de l’état du réseau.
Le tableau ci-dessous récapitule le volume en kilo-octets pour chaque type de données.
| LILLE | LYON | MARSEILLE | NANCY | NANTES | PARIS | TOULOUSE | |
| Données temps réel | 37 | 84 | 57 | 100 | 98 | 95 | 74 |
| Stockage | 9073 | 19917 | 12281 | 19788 | 19142 | 21913 | 13354 |
| Données fixes | 3053 | 4133 | 3375 | 4178 | 3929 | 3806 | 4085 |
L’examen des volumes des bases de données montre que pour cinq dispatchings, les tailles sont comparables. La valeur maximale, environ 25 millions d’octets, est compatible avec les possibilités technologiques actuelles puisqu’il existe des disques de 50 millions d’octets.
CHAPITRE 6 – LOGICIEL DE BASE
Le logiciel de base d’un ordinateur est l’ensemble des outils logiciels qui permettent d’utiliser une installation informatique.
Il sera fourni par le constructeur, le soumissionnaire ou E.D.F., suivant des conditions définies dans le document « Limite de fourniture du matériel et du logiciel » joint à l’appel d’offres.
D’une manière générale, il est demandé aux soumissionnaires d’utiliser au maximum le logiciel du catalogue du constructeur, à l’exception toutefois du logiciel de reconfiguration qui devrait vraisemblablement être spécifique.
Dans le cas des programmes figurant au catalogue du constructeur, les soumissionnaires transmettront les caractéristiques principales. Pour le logiciel spécial, un document détaillé devra être fourni comprenant principes et réalisations.
Dans les deux cas, l’accent sera mis sur la maintenabilité des programmes. Ce logiciel comprend :
Le système d’exploitation temps réel qui peut être décomposé en quatre sous systèmes relatifs à :
. la gestion des programmes qui comprend
- le programme de gestion des ressources chargé de gérer au mieux les ressources du système dans le cadre de l’utilisation du moniteur « multitâches ».
- les demandes d’exécution de programmes. L’exécution d’un programme peut être demandée par l’intermédiaire d’interruptions, par un autre programme, par un « programme horloge ».
- les priorités et les modes d’exécution des programmes.
. le traitement des entrées-sorties qui comprend
- les handlers qui exécutent les entrées-sorties au niveau élémentaire et qui sont spécifiques de chaque périphérique
- la gestion des entrées-sorties, c’est-à-dire des files d’attente.
- les commandes d’entrées-sorties depuis les programmes utilisateurs.
. la gestion de l’heure
Le système doit pouvoir acquérir l’heure depuis une horloge externe, et en cas de panne de celle-ci, utiliser l’horloge interne.
. la détection des pannes et la reconfiguration
Le logiciel devra répondre aux exigences définies au paragraphe §4 (Architecture : surveillance commande et reconfiguration).
. la génération du système
Le système d’exploitation sera livré sur cartes interprétées et sur bandes magnétiques, ainsi que le système de génération. Diverses modifications devront être possibles sans régénération de l’ensemble du système.
. un système de traitement par lots
Un moniteur d’exécution de traitement par lots devra être fourni.
La production de programmes et de langages
L’écriture des programmes d’application ainsi que leur mise au point étant à la charge des équipes d’E.D.F., celles-ci devront disposer d’un logiciel leur permettant de s’acquitter de cette tâche.
Ce logiciel comprend :
. un assembleur et un macro-assembleur
. un compilateur FORTRAN IV temps réel, un macro-générateur et une documentation technique sur les autres langages évolués.
. un éditeur de liens et un chargeur.
Programmes de gestion de fichiers
Un certain nombre d’exigences sont formulées auprès des soumissionnaires Elles reposent en particulier sur le principe que le processus de génération et de modification de fichiers devra être tel que l’exploitant soit assuré d’avoir dans tous les cas un système parfaitement opérationnel et fiable. C’est à dire que les créations et les modifications de fichiers pourront s’effectuer à l’aide d’un éditeur de textes simple d’emploi, ce qui permettra de pouvoir associer exploitants du réseau et informaticiens à la mise à jour.
Elles se feront par cartes perforées ou par console et les informations à introduire présenteront peu de redondance.
Par contre les fichiers générés sur disques temps réel pourront comporter des redondances de façon à accélérer les traitements sous temps réel.
Logiciel d’aide à la programmation
L’évolution permanente des programmes d’application conduit à inclure tous les éléments nécessaires à un développement « on line » de ce logiciel. Ces opérations se feront au niveau de priorité le plus bas de la machine et ne devront pas risquer de perturber l’exploitation temps réel
Ce logiciel comprendra notamment des programmes :
. de gestion des modules permettant d’introduire des modifications au niveau des langages source et binaire.
. de test et d’élimination des erreurs afin de pouvoir mettre au point les programmesd’application sûr dés copies de la base de données.
Programmes de service et de test, permettant notamment la visualisation d’informations en mémoire et sur disques, le changement de supports pour les données ainsi que l’établissement de diagnostic pour les pannes.
Simulateur d’aide au démarrage.
Ce système, en cours de réalisation pour le SYSDIC, au service IMA de la DER, pourra être utilisé pour les S.I.R.C. Son rôle sera triple :
– aider à la mise au point du système
– évaluer les performances
– valider le dialogue opérateur – machine.
CHAPITRE 7 – QUALITE DE SERVICE
La qualité de service du système informatique ne peut être simplement perçue à travers la disponibilité de chaque classe de fonctions. Il faut également tenir compte des divers fonctionnements en mode dégradé. Au cours de ce chapitre, ceux-ci sont précisés en ne prenant pas en compte des critères purement informatiques mais en se plaçant du point de vue de l’exploitant.
Pour l’étude de la qualité de service, nous distinguons à l’intérieur d’une même classe de fonctions :
Les fonctions essentielles :
Ce sont celles qui déterminent la disponibilité de la classe.
Les f onctions rattachées
Elles sont étroitement liées aux précédentes et, de ce fait, rattachés à la même classe, mais leur disponibilité propre n’aurait pas besoin d’être aussi élevées que celle requise pour les fonctions essentielles auxquelles elles sont rattachées.
Cette séparation de fonctions nous amène à considérer deux types de périphériques :
– les périphériques indispensables : ce sont ceux sans lesquels les fonctions essentielles d’une classe ne peuvent plus être assurées.
– les autres périphériques dont la perte permet néanmoins une exploitation en mode dégradé.
En conséquence, nous entendons par :
– panne : une situation dans laquelle les fonctions essentielles du calculateur ou du système ne peuvent plus être assurées.
– mode dégradé : une situation dans laquelle certaines fonctions ne peuvent être assurées mais qui néanmoins permet une exploitation du système.
Un classement de la périphérie de chaque classe de fonctions, selon l’un des deux types précédemment définis, est fourni dans ce chapitre.
Les pannes et modes dégradés des différents équipements du S.I.R.C., puis la répercussion des pannes sur le fonctionnement du système sont successivement étudiés, de manière détaillée.
La configuration minimale du système après panne est définie. Elle correspond au mode le plus dégradé compatible avec l’exploitation et comprend :
– un calculateur et un disque associé
– le système minimal de visualisation : un poste à deux écrans
– une liaison avec le CACQ.
Les reconfigurations nécessaires devront être commandées automatiquement, les opérations manuelles devant toujours être possibles et prioritaires par rapport aux autres.
Les exigences en matière de disponibilité pour chaque classe de fonctions ont été définies par ailleurs, mais dans ce chapitre des précisions sont apportées sur les critères de calcul du taux de disponibilité, sur l’incidence des reconfigurations et sur la perturbation de l’exploitation qui en découle
Enfin, les demandes concernant la maintenabilité des matériels et des logiciels sont précisées. Il est exigé qu’E.D.F. puisse disposer des approvisionnements en pièces détachées et du support technique pour la mise à niveau des éléments du système pendant une période de quinze ans. La formation des équipes d’E.D.F. est également évoquée.
CHAPITRE 8 – ARCHITECTURE
Au cours de ce chapitre, les diverses contraintes imposées au matériel informatique sont définies et des exemples d’architecture proposés, mais le choix de celle-ci est laissé aux soumissionnaires.
. Principes de base
Certaines règles générales de conception dont les soumissionnaires devront tenir compte sont précisées, concernant :
– l’adaptabilité du système
– le choix des matériels
– les problèmes liés à la reconfiguration
– la disponibilité
. Description du système d’un S.I.R.C.
Un rappel sur la périphérie associée à chaque classe de fonction, les liaisons des calculateurs S.I.R.C. entre eux et les liaisons avec d’autres systèmes informatiques est effectué. En ce qui concerne les liaisons entre les calculateurs du S.I.R.C., nous précisons qu’elles pourront être réalisées soit par liaisons inter-calculateurs, soit par disques commutables.
. . Eléments de choix
Pour l’architecture, le choix du nombre de calculateurs dépend de la répartition des fonctions en classes auxquelles des taux de disponibilité
à atteindre sont imposés et de la charge dé celles-ci sur chaque calculateur.
Une pré-étude réalisée en liaison avec le service IMA permet de citer deux exemples d’architecture possible:
– un système à deux calculateurs avec secours simple
– un système à trois calculateurs avec secours double des fonctions les plus importantes.
– Architecture à deux calculateurs
En situation normale la répartition des classes suivantes est adoptée
- le calculateur 1 assure les fonctions A, B, C
- le calculateur 2 assure les fonctions D.
Dans cette hypothèse, avec des calculateurs industriels, le taux d’occupation est trop important et il faut utiliser des calculateurs à 32 bits par mot ou multi-format. (Il est cependant à noter que le gain de performance entre un calculateur CII.HB 7740 et un MITRA 125 n’est pas, d’après les résultats de bancs d’essais, très important).
On obtient alors un taux de disponibilité :
. pour les fonctions A, B et C de 99,88 %
. pour les fonctions D de 93,6 %
Le prix du matériel, consoles graphiques exclues, peut être évalué grossièrement dans le cas du 7740 à : 7300 kF.
– Architecture à trois calculateurs
Elle doit pouvoir être réalisée avec des calculateurs industriels .MITRA 125 par exemple).
La répartition en situation normale peut être :
. Calculateur 1 : A et une partie de B (analyse primaire)
. Calculateur 2 : le reste de B et C
. Calculateur 3 : D.
. Les charges (CH) et les taux de disponibilité (TD) suivants sont obtenus :
. pour les fonctions assurées par 1 CH=30 % TD = 99,9998 %
. pour les fonctions assurées par 2 CH= 63 % TD = 99,98 %
. pour les fonctions assurées par 3 CH faible TD = 95,37 %
.
Ces charges ne prennent pas en compte le système d’exploitation temps réel (10 à 20 % de charge supplémentaire).
Le coût peut être estimé, consoles graphiques exclues, à 2 235 kF environ.
Les résultats de cette pré-étude (charge, disponibilité) né figurent pas dans la note mais les deux architectures sont proposées comme exemples aux soumissionnaires qui devront justifier leur choix.
Le groupe de travail a marqué sa préférence pour une solution à trois calculateurs.
En effet, dans la solution à deux calculateurs, pour que les fonctions de la classe A aient la disponibilité requise, il semble indispensable de prévoir un système simplifié d’entrée-sortie relié au CACQ système rustique ») permettant la visualisation de certaines informations et l’envoi d’ordres élémentaires de télécommande.
Elle nous semble présenter par rapport au système à 3 calculateurs, plusieurs inconvénients.
Elle accroît le coût de l’ensemble et entraîne des modifications de logiciel dans les CACQ. D’autre part, l’utilisation de ce dispositif sera plus difficile que celle du système normal et ne se fera que quelques heures par an.
Par contre, le système à trois calculateurs garantit un dialogue homme-machine identique dans toutes les situations (sauf bien entendu en cas de panne des trois calculateurs). La charge indiquée précédemment peut paraître élevée, mais elle a été calculée dans l’hypothèse la plus contraignante du point de vue du nombre de téléinformations. De plus, on peut penser que l’hypothèse retenue d’un temps moyen d’instruction égal à 3 µs est pessimiste. Ce système à trois calculateurs implique cependant une complexité accrue du logiciel qui pourra être toutefois simplifiée en acceptant une reconfiguration manuelle en cas de défaillance de deux calculateurs.
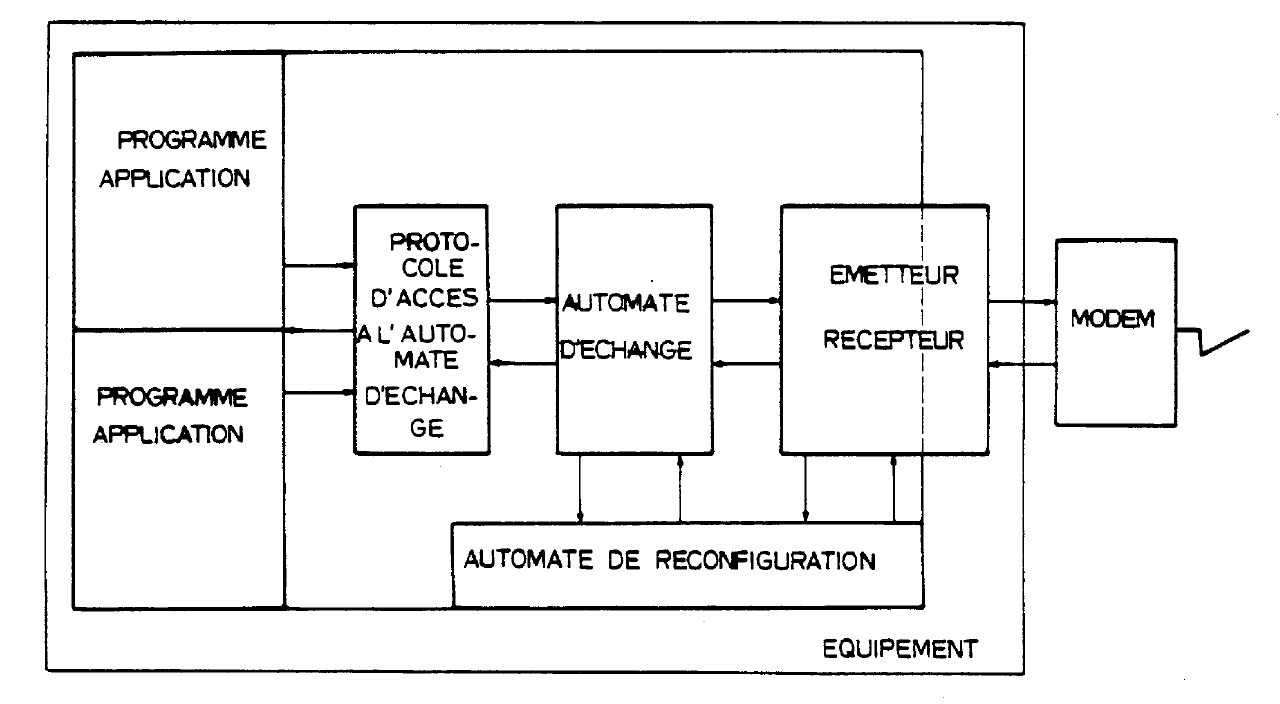
. . Surveillance, commande et reconfiguration
Pour atteindre les objectifs de disponibilité demandés, les soumissionnaires devront prévoir un système de reconfiguration. Deux possibilités existent :
– Centralisé
Un dispositif centralise toutes les informations sur l’état du système détermine la stratégie à adopter et envoie les ordres de reconfiguration.
– Réparti
Chaque calculateur reçoit les informations du système et élabore une stratégie en tenant compte de sa situation propre.
Dans ces deux cas, la reconfiguration devra être soit automatique (dans le cas de panne du système), soit manuelle, mais pouvant être réalisée simplement par le dispatcher. Afin de pouvoir commander ce deuxième type de reconfiguration, l’exploitant devra donc être informé de l’état du système. Cette information lui sera communiquée par l’intermédiaire :
. de la machine de commande
. du système de visualisation
. d’un synoptique de commande et de contrôle.
Il sera également procédé à l’établissement de statistiques sur les incidents afin de pouvoir déterminer les points critiques du système.
Les méthodes de détection des pannes sont essentielles pour la réalisation des commutations appropriées. Il est donc demandé aux soumissionnaires de les préciser pour :
. l’alimentation électrique
. l’unité centrale
. l’autocontrôle
. la mémoire
. les entrées-sorties
. la panne d’un programme ‘application. .
.
CONCLUSION
. Il est demandé aux soumissionnaires de sélectionner une architecture comportant 2 ou 3 calculateurs à 16 ou 32 bits par mot ou multi-formats, de définir l’option et le matériel retenus pour la reconfiguration et d’évaluer la disponibilité des classes ainsi que la charge en pointe et en moyenne.
Ils devront également fournir le coût du système en indiquant :
– d’une part, son coût de base ;
– d’autre part, le surcroît de coût entraîné par chaque option ou par
– périphérique supplémentaire.
[1] L’équipe était composée d’Alain Hérault, Gérard Ducheler et Pascal Ordoquy. Elle a servi d’embryon pour l’équipe SIRC qui a piloté la réalisation. (Ajout lors de la mise en forme de la note)